D-PIRO
2011 – 2013

The D-PIRO project (meaning in french : Drone Photovoltaïque Intelligent à Reconnaissance d’Objets) was part of the requirements for my MSc, we were 5 student to work on it.
This project’s goal was to get used to managing projects in terms of time and costs, to use the skills we were taught in electronics, image processing and computer vision, and to learn new skills like flying a UAV, building it, soldering, HF transmissions etc…
We thus designed the project so it would be compatible with the time and financial constrains as well as the experience we wanted to get and the affinity for UAVs we had.
The UAV we selected is an hexacopter Arducopter, it can fly 15 minutes and carry a payload of up to 1.5Kg. It is steerable via a RC or the Mission planner software using waypoints. A solar panel was charging the batteries on the ground so continuous flights were possible.
The system is described as follows (“alimentation” means power supply and “voiture” means car):
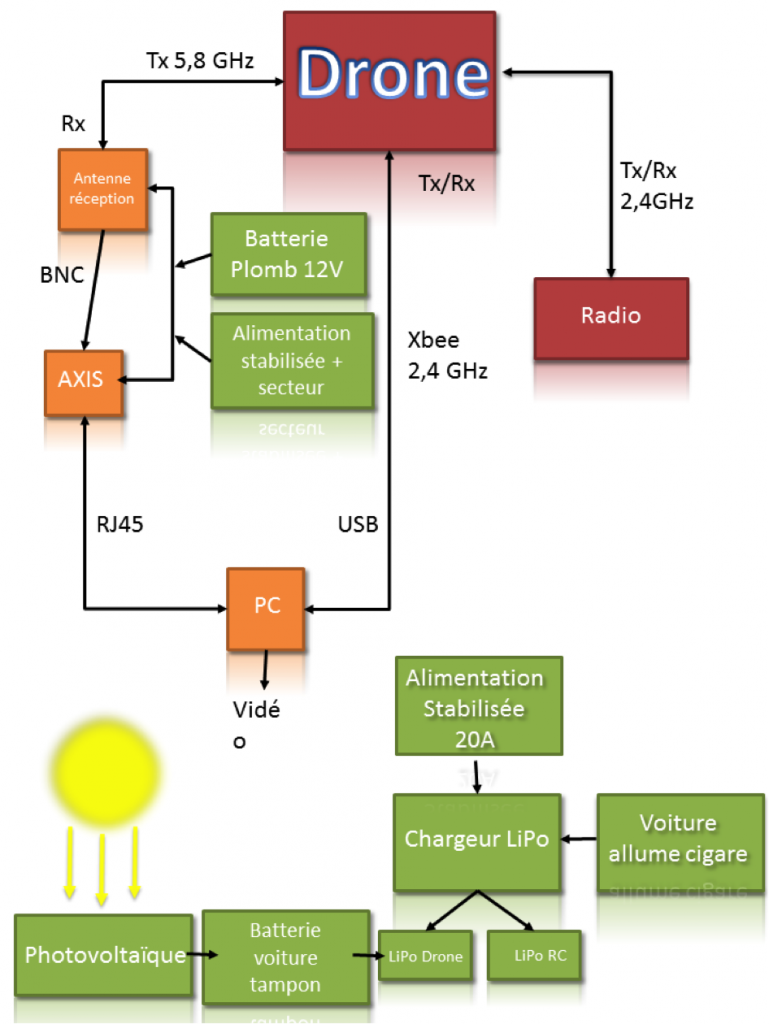
Given the autonomy and payload, we put the necessary hardware onboard so we could capture live footage on the ground PC and run computer vision code.
The functions that we implemented are: circle (see VBAS), square and color (RGB and HSV were used) detection robust to lighting, noise and scale. For detection we outputed the size, area and number of objects.
Exemple of color detection :



And circle detection:
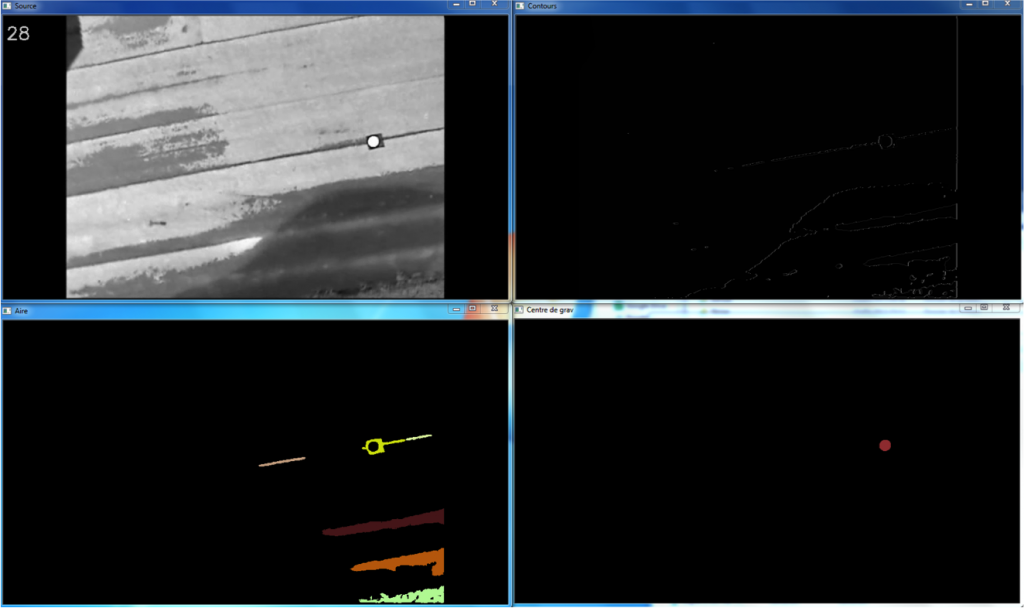
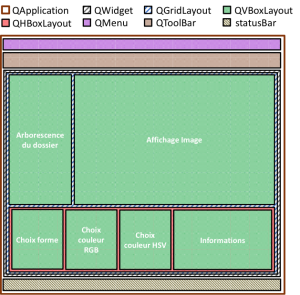
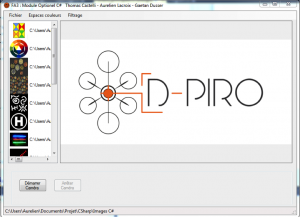
It has been coded in C# using Qt and OpenCV, the interface was defined as follows:
The 5 of us were not always in the same city (see why at TELECOM Saint-Etienne), so to organize our work we used a forum. We also shared our progress online via social medias :
Forum:

Twitter:

Facebook:

Poster:

Some pics of the team :